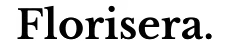


Motors are primarily categorized as either AC or DC, with further classifcation based on their inherent rotation characteristics. In this article, we will commence by explaining the operation of the induction AC motor. The subsequent section delves into another type, specifically the synchronous AC motor. Finally we will provide an overview of the main pros and cons of these motors, aiding you in determining the most suitable AC motor for your DIY project.
For those interested, I’ve written two more articles on DC motors. You can find them in the following links: “Brushles vs brushed DC motors: which to choose” and “Controlling stepper motors with MCUs”.
Induction Motors: The Unsung Heroes of Industry
Induction motors, also known as asynchronous motors, are the most common type of AC motor, accounting for over 90% of all AC motors used worldwide. They are renowned for their simplicity, reliability, and cost-effectiveness. Induction motors utilize a rotating magnetic field produced by the stator coils to induce currents in the rotor, which then generates torque. This self-starting mechanism makes induction motors ideal for a wide range of applications, including fans, pumps, and conveyor belts.
Synchronous Motors: Precision Performers
Synchronous motors, on the other hand, operate at a constant speed synchronized with the frequency of the AC supply. They achieve this by employing permanent magnets or DC electromagnets on the rotor, which interact with the rotating magnetic field of the stator. Synchronous motors offer several advantages over induction motors, including higher efficiency, lower torque ripple, and precise speed control. They are commonly used in applications requiring constant speed and smooth operation, such as generators and electric vehicles.
1. Induction Motors (IM)
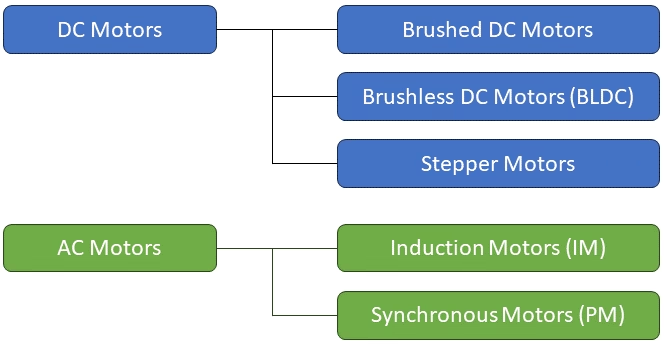
Similar to other types of motors, the induction AC motor consists of an outer part, the stator, and an inner part, the rotor. Depending on the type of induction motor (1 phase or 3 phase), you will copper wires, which are wrapped into coils. For a 3-phase induction motor, as shown in Figure 2, there are 3 sets of coils, illustrated with U, V and W. When connected to an AC power supply, they will create a rotating electromagnetic (EM) field.
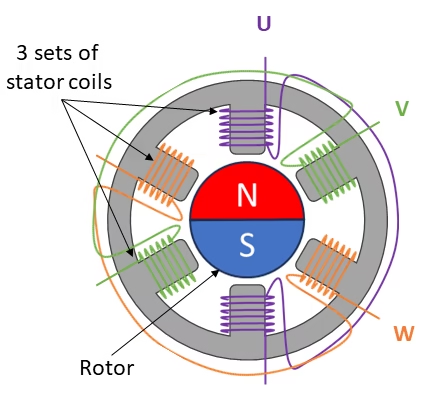
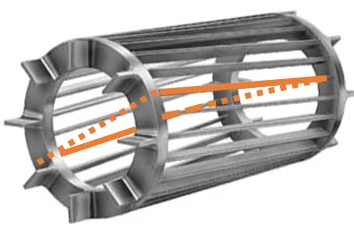
The rotor is situated in the middle of the stator, and it includes the shaft. For this case I am describing here, it is an squirrel cage type motor. It is called a squirrel cage, cause it consists of two rings with bars in between, similar to a mouse (or squirrel) exercise wheel. The squirrel cage is filled with laminated sheets that concentrate the magnetic field in the bars, as is shown in Figure 3. They use sheets, instead of large metal parts, as it lowers eddy currents and increases the efficiency of the EM transfer. This method is similar to the laminated parts of transformators. When the rotor and shaft are palced inside the stator, and the device is connected to an AC power supply, the rotor will begin to rotate on its own.
1.1 Working pinciples
Before we delve any deeper, we need to go over some of the basic physics principles that you should know to understand what is happening inside an induction motor.
Ampere's law
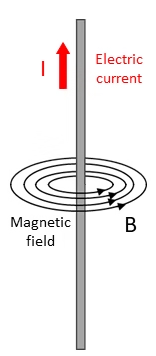
In electromagnetism, the Ampere’s law describes the magnetic field produced by a steady current in a wire. I will not go through the derivation or show you the equations. For this example, all you need to know is the simplified form of the right hand rule. If the current is flowing as shown in Figure 4, you align your thumb with the current, the direction your fingers wrap around the conductor represents the direction of the magnetic field.
Faraday's law of electromagnetic induction
When a conductor moves through a magnetic field or experiences a changing magnetic field, it induces an electromotive force (EMF) or voltage in the conductor. If the conductor forms a closed loop, this induced EMF can drive a current.
Lorentz Force
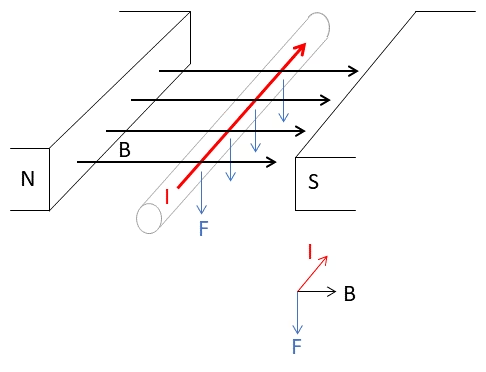
The Lorentz force is the force experienced by a charged particle moving in a magnetic field. It is named after the Dutch physicist Hendrik Lorentz, who contributed significantly to the development of electromagnetic theory. The Lorentz force is a fundamental concept in electromagnetism and plays a crucial role in understanding the interactions between charged particles and magnetic fields. When applied to a current-carrying wire, each moving charge within the wire experiences a Lorentz force, resulting in a total force on the entire wire perpendicular to the current and the magnetic field.
The right hand rule will be when you point your thumb in the direction of the current, and your fingers in the magnetic field direction. Then your palm direction is the direction of the force acting on the wire (in actuality it is on the charge of the electrons).
If this current-carrying wire is wraped into a coil, the magnetic field is stronger and directional within the coil, basically creating a north and south pole; this is called an inductor. When an AC current (sine-wave) flows through the coil, the strength will vary in time, and the polarity of the inductor will change in the coil. Two coils together create a larger magnetic field.
If we placed a closed loop of wire inside the variable magnetic field (from the AC power supply on the stator coils); according to Faraday’s law, it will induce a current in this closed loop. This current in the closed loop wire will create a magnetic field, which in turn interacts with the larger magnetic field, and according to Lorentz law, both sides of the closed loop, will experience opposing forces, which causes it to rotate.
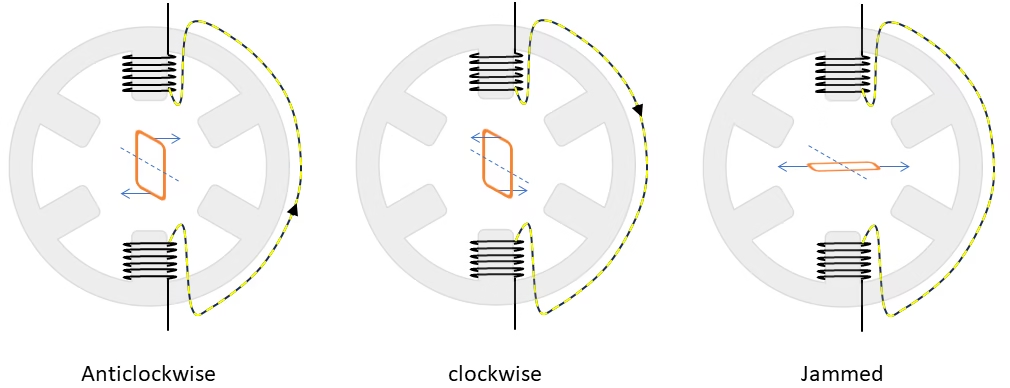
This closed loop is illustrated in Figure 6 with orange color. The two coils on the stator will apply the large variable magnetic field. The north/south poles will reverse with the reversion of the current. Hence the closed loop will feel it’s Lorentz force in two directions, depending on the current direction. With a single stator you can make the loop turn either clock- or anticlockwise, until it is in the “jammed” position where it is not able to turn further (until current is reversed, but then it might not make a full turn, but just returns).
The bars of a squirrel cage are shorted at each end, which therefore creates multiple closed loops. Hence each bar will have its own EM field due to the current flowing in it, which all interacts with the EM field of the stator. The closed loop on the rotor is illustrated in Figure 7. As you can imagine, there are multiple loops possible for this design. As a side note, the bars of the rotor as slightly skewed, this helps distribute the EM field across multiple bars and stops the motor from jamming.
To have an actual rotating rotor, more sets of coils have to be introduced. Figure 2 showed an example of 3 sets of rotors labelled U, V, and W. They are situated on the stator with an angle difference of 120 degrees from each other. They are powered by a 3 phase power supply, which indicates that each coil operates at a different phase, so that the EM field will change in strength and polarity at a slightly different time, as illustrated in Figure 8.

The rotor in an induction motor will attempt to follow the rotating magnetic field generated by the stator. However, due to the inherent design and the time delay involved in the magnetic field induction process, the rotor never quite catches up with the rotating magnetic field. This asynchrony is what makes it an asynchronous motor.
The difference in speed between the rotating magnetic field and the rotor is called “slip.” Slip is necessary for the motor to generate torque and operate. If the rotor were to perfectly match the speed of the rotating field, there would be no relative motion, and no current would be induced in the rotor, resulting in no torque production.
1.2 Connections
All 3 phase AC motors have an electrical terminal box located either on top or at the side of the AC motor. In here the wires of the stator coils U, V, and W can be connected to the 3 phase lines L1, L2, and L3.
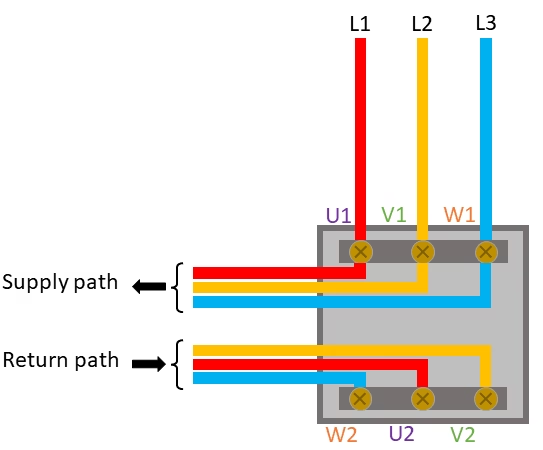
Figure 9 shows an illustration of such an electrical terminal box. Inside the box, we have 6 electrical terminals. As each stator coil has 2 end wires, we denote them as U1 and U2, similar for the other two coils. Notice that the electrical terminals are arranged in a different configurations at the top and bottom. The top row starts with U1 while the bottom row starts with W2.
There are two ways to complete the circuitry, which is either done with a Delta configuration or a Wye configuration. Both configurations have their advantages, and the selection depends on factors such as voltage ratings, equipment design, insulation considerations, and overall system needs.
Delta configuration
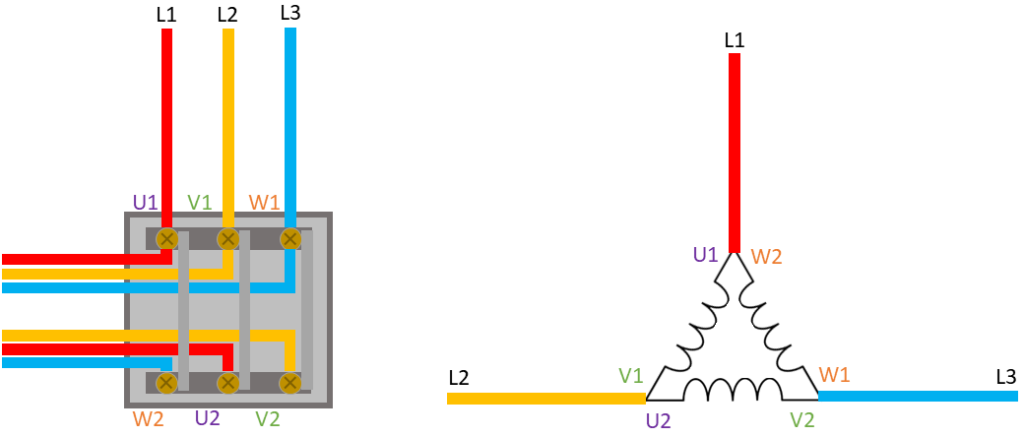
To complete the circuit in this configuration we connect U1 with W2, V1 with U2 and W1 with V2, as shown in Figure 10. Thus, the ends of each phase winding are connected to the start of the next phase winding in a triangular or delta-shaped pattern.
Delta configurations are often used in systems with higher voltages because the line voltage is the same as the phase voltage, simplifying equipment design.
Wye ( Y) configuration
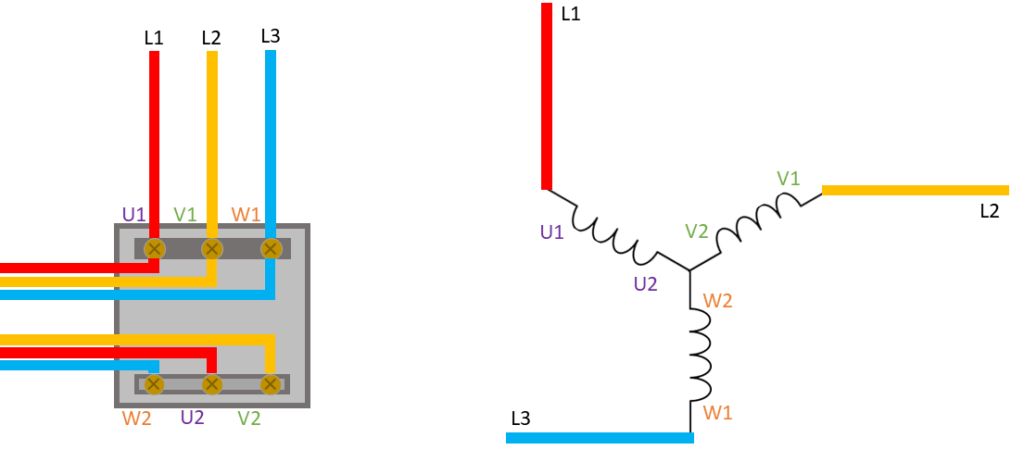
For this Wye configuration, one end of each phase winding is connected together at a common point, forming a Y or star shape. This is done by connecting W2, U2 and V2 together, as shown in Figure 11.
Wye configurations are often preferred in lower voltage systems because the line voltage is √3 times the phase voltage, reducing the insulation requirements for equipment.
Check my article on Y and Delta configurations to get a deeper understanding of the calculations in these systems: “3 Phase AC systems”.
2. Synchronous Motors (PM)
AC synchronous motors are a type of AC motor that operates at a constant speed synchronized with the frequency of the AC supply. They are characterized by their ability to produce a smooth and consistent torque profile, making them suitable for applications requiring precise positioning and high efficiency. Synchronous motors are commonly used in applications such as generators, electric vehicles, and precision machinery.
The coils of the stator are powered by a 3 phase electric power of alternating currents. In this way, they produce a rotating magnetic field, that rotates at a fixed speed, related to the power frequency. The rotor on the other hand, have fixed magnetic poles, that can either be made by a direct current on the stator’s coils, or by having permanent magnets in its place, as is shown in Figure 12.
The opposite poles of the stator and rotor are attracted, so that the rotating field of the stator attracts the rotor, forcing it to rotate at a fixed speed. Hence the name Synchronous Motors, as they rotate at a synchronous speed. Because of this, it is not able to accelerate or decelerate, as it is bound to the power frequency (which in most cases is fixed). Moreover, it cannot withstand significant motor loads. When it breaks its synchronous speed, the two magnetic fields fall out of synchronization as well, causing the rotor to stop.
If the rotor is stationary and does not move, the rotating magnetic field of the stator can not start the motor. This is because the attracting and repulsive fields of the stator alternate too quickly. This is demonstrated in Figure 13, where in fact the rotating magnetic field of the stator is moving at a much faster angular speed, compared to the rotor. So fast, that for all purposes the rotor is standing still. Each permanent magnet does feel an attraction to its opposite pole for a short period, but quickly gets repulsed as well from its opposite polarity, hence it is never able to start.
To address this challenge, a solution inspired by induction motors is employed. By introducing a squirrel cage rotor (refer to Figure 3), the motor gains assistance during the initial start-up phase. During this starting phase, the rotating magnetic field induces electricity into the squirrel cage bars, a process akin to induction motors. Once the synchronous speed is attained, the rotor coils are energized, transforming the motor into a synchronous mode. Simultaneously, as the synchronous speed is reached, the relative speed between the squirrel cage and the rotating magnetic field diminishes, preventing further induction of electricity. Consequently, the rotor achieves and maintains synchronous speed without continuous induction.
Motor overload, and low supply voltage are reasons for the motor to get out of synch. If external torque load is more than the torque produced by the motor, it will slip out of synchronism, and will eventually come to rest.
It is also interesting to note that synchronous motors have the same constructional features as that of an alternator. For that reason, it is often used in electric and hybrid cars. It can than be used as a motor to provide the power to the wheels, but also as an alternator in the regenerative breaking phase to recover kinetic energy and convert it into electric energy to be stored in the battery.
In the last few years, the improvements in electrics have made synchronous motors easier to use, as inverters can now modify both the frequency and the power supply voltage. As a result, starting from 0 frequency and increasing it gradually, it is possible to start the engine from a standstill.
3. Advantages and Disadvantages
| Synchronous motor | Induction motor |
|---|---|
Construction is complicated |
Construction is simpler |
Not self-starting |
Self-starting |
Additional DC source for rotor excitation |
Rotor gets excited by the induced EMF, no additional source is required |
Speed is synchronous, irrespective of load |
Speed is always less than synchronous |
Speed control is only possible with expensive additional electronics |
Speed control is only possible with expensive additional electronics |
As load (slowly) increases, speed stays constant |
As load increases, the speed decreases |
Motor is sensitive to sudden load changes |
Motor is less sensitive to sudden load changes. |
Motor is costly and requires frequent maintenance |
Motor is cheap and almost maintenance free |
Offers inherent power factor corrections |
– |
Efficient at full load condition |
Rotor losses and slip, which contributes to a less efficient system |
Higher torque capability per volume motor |
Lower torque capability per volume motor |
Florius
Hi, welcome to my website. I am writing about my previous studies, work & research related topics and other interests. I hope you enjoy reading it and that you learned something new.
More Posts